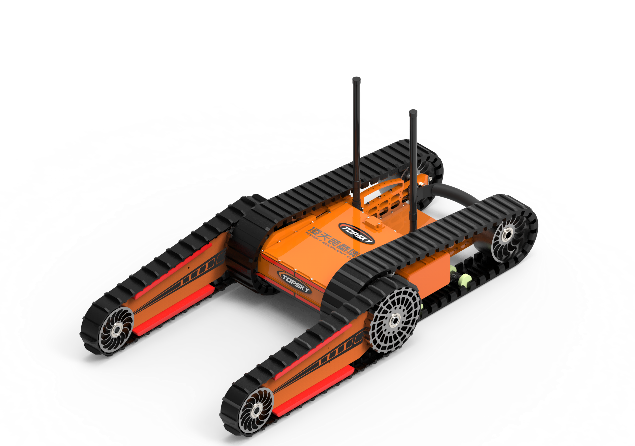
RXR-C10D Parvus robot exploratorius ignis


| Automata exploratoria ignis praecipue adhibentur ad locos artificialiter appropinquantes inflammabiles, explosivos, complexos, aliosque asperos, ad explorationem environmentalem et detectionem gasorum. Adhibentur etiam ad explorationem in spatiis parvis et humilibus, ut in fundo corporis currus et fundo tabulati. Chassis structuram brachii duplicis oscillantis repentis et anterioris habet, quae obstacula verticalia ad summum 280 mm transire potest, et suggestum 360 mm ascendere, quae variis locis ad celerem pugnam accommodari potest. Interfacies expansionis multifunctionalis variis modulis corporis instrueri potest. Simul, automata imperio filario instructa sunt, qui per fila remote operari potest sub condicione impedimenti signalis. Brachia duplicia oscillantia automati libere dissolvi possunt, quae in pluribus casibus adhiberi possunt. |
| 2.Proprietates |
| 1. Telemoderatio callida / Bulla expansionis multifunctionalis Operatio visualizata in magno schermo 2. Modulizatio totius machinae Modularizatio chassis, modularizatio accumulatoris, modularizatio suspensionis 3. Excellens effectus in ascensu, scalarum ascensu, impedimentorum transitu et fossarum transitu. Declivia quadraginta quinque graduum ascendere potest Scalas quadraginta graduum ascendere potest Obstacula verticalia 28 cm ascendere potest Fossas 41 cm latas transire potest 4. Systema video Modus communicationis trium punctorum, ad operationes normales in ambitu non visuali solvendas, distantia communicationis 1km Camera HD bicanalis 5. Moduli expansionis multiplices Modulus lidar, modulus detectionis gasorum, modulus cardinis exploratorii, modulus brachii robotici
Quattuor portus extensi ad aviationem destinati, RS232, RS485, CAN, portus retiarius reservati, 24V, 12V (normaliter clausi)
|
| 3.Tparametri technici3.1 Totus robot: 1. Nomen: RXR-C10D parvus robot exploratorius ignis (B) 2. Exemplar: RXR-C10D 3. Munus fundamentale: functio explorationis per imagines 4. Gradus tutelae: gradus tutelae totius roboti est IP67 5. Potentia: electrica, altilium lithii ternarii 6. Magnitudo: ≤ longitudo 610mm × latitudo 490mm × altitudo 200mm (sine antenna) 7. Diameter conversionis: in loco rotans 8. Pondus: ≤25kg 9. Maxima celeritas linearis: ≥2.7m/s, celeritas continua per imperium remotum 10. Deviatio recta: ≤5% 11. Facultas scandendi: ≥45° 12. Facultas scandendi: ≥40° 13. Altitudo impedimentorum transeundi: ≥280mm 14. Tempus ambulationis continuae: ≥2h 15. Distantia moderationis remotae sine filo: 500m (aperta) 16. Distantia transmissionis imaginum sine filo: 500m (aperta) communicatio duorum punctorum; 800m (aperta) communicatio trium punctorum ad scaenam occlusionis occurrendam (ad libitum); 17. Spatium telemoderationis filariae: 100m 18. Spatium transmissionis video filaris: 100m 19. Reptator automaticus: Reptator automaticus ex gummi ignifugo, antistatico et temperaturae altae resistente factus erit, Kevlar intus habens, et designo praesidii contra eversionem lineae egressus.
3.2 Perceptio imaginum roboticarum: 1. Numerus et configuratio camerarum: Duae camerae altae definitionis in corpore simul observari et regi possunt, et ambitus circa scaenam stabile moderatori remoto praesentari potest, quod gubernationem sine filo roboti satisfacere et efficaciam pugnae magnopere augere potest. 3.3 Parametri configurationis terminalis moderationis remotae 1. Dimensiones: 362*188*40 (exclusa altitudine oscillatoris) 2. Pondus totius machinae: 2.5kg 3. Ostentatio: non minus quam decem unciarum LCD altae claritatis velum, quattuor canales commutationis signi video 4. Systema moderandi: systema operandi fenestrae 10 5. Tempus laboris: 2h (continuum) 6. Munera fundamentalia: Imperium remotum et monitor integrata et portatilia sunt, quae simul observari et regi possunt, et ambitus circa scaenam stabile operatori remoto praesentari potest. (Functio optionalis) Ostentatio in tempore reali corporis vehiculi et capsulae moderationis remotae potentiae pilae, distantiae ambulandi et aliarum informationum, et motus robotis antrorsum, retrorsum et gubernationis moderari potest. Modus transmissionis datorum est transmissio sine filis utens signo encryptato. 7. Functio inscriptionis et reproductionis imaginum: imagines quovis tempore scribi possunt, et contenta imaginis scriptae sponte servari possunt, et imagines directe in terminali moderandi remoti ludi possunt, vel imagines ad alia instrumenta copiari possunt. 8. Functio moderationis ambulationis: Ita, una gubernatrix operationem flexibilem robotis progredientis, retrogredientis, conversionis sinistrae et conversionis dextrae efficit. 9. Commutator video: Ita, commutator rotationis automaticae 10. Functio moderationis illuminationis: Ita, commutator basculans
4.4 Alia: Sclopa communicationis filaria 100m Longitudo: 100mm |
| 4.Configuratio producti |
| 1. RXR-C10D parvus robotus exploratorius ignis (B) 1 par 2. Arca gubernationis remotae (pila inclusa) 1 par 3. Caricator moderatoris remoti (12.6V) 1 pz 4. Impletor corporis robotici (25.2V) 1 1 pz 5. Antenna transmissionis imaginis 1.4GHZ quattuor 6. Communicatio filaria 100 metrorum spool 1 pcs 7. Instrumenta auxiliaria 1 set |